
oder Traktion mit elektrischen Maschinen
Nicht neu, die Idee an sich. Bereits unter den ersten Kraftfahrzeugen, die jemals gebaut wurden, waren im erheblichen Maße Elektrofahrzeuge. Es gibt Experimentalfahrzeuge, bei denen ein Generator am Verbrennungsmotor angebracht ist, Elektromotoren befinden sich direkt an den Rädern, wo diese angetrieben werden. Dennoch ist einiges neu an meiner Idee.
Ich kam darauf durch eine theoretische Überlegung im Bereich Modellbau. Es ging darum, wie man ein Modellfahrzeug ohne Untersetzung durch Zahnräder kräftig genug antreiben kann. Hierzu konstruierte
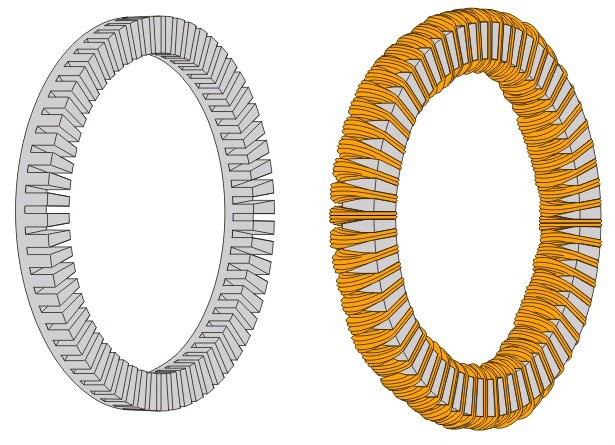
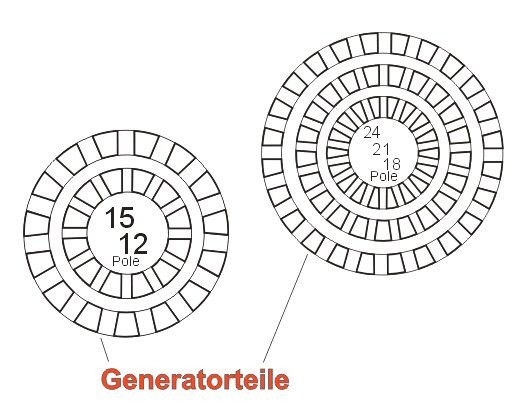
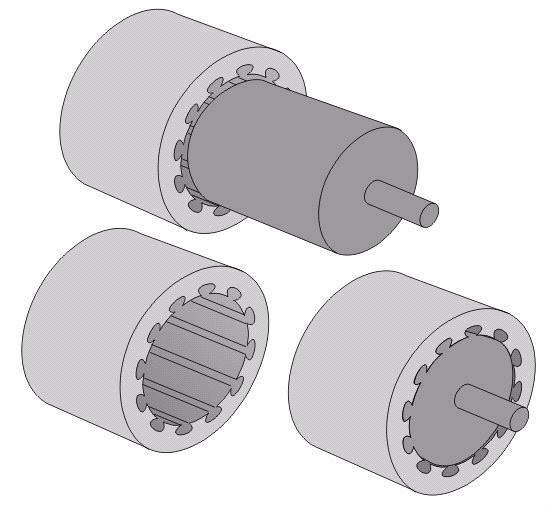 ich eine recht ungewöhnliche Anordnung, erinnert an Scheibenläufern. Herkömmliche Maschinen bestehen aus einem Eisenkörper, meist aus ‚Elektroblechen’ schichtweise aufgebaut. Darin befindet sich eine Bohrung, mit Nuten versehen. In diese Nuten wird die Wicklung eingelegt (nicht dargestellt, Bilder links). In der Bohrung befindet sich ein zylindrischer Läufer. Scheibenläufer sind im Vergleich dazu flach aufgebaut (Bild rechts).
ich eine recht ungewöhnliche Anordnung, erinnert an Scheibenläufern. Herkömmliche Maschinen bestehen aus einem Eisenkörper, meist aus ‚Elektroblechen’ schichtweise aufgebaut. Darin befindet sich eine Bohrung, mit Nuten versehen. In diese Nuten wird die Wicklung eingelegt (nicht dargestellt, Bilder links). In der Bohrung befindet sich ein zylindrischer Läufer. Scheibenläufer sind im Vergleich dazu flach aufgebaut (Bild rechts).
Ständer und Läufer stehen sich mit den Stirnflächen gegenüber. Beide Teile müssen zusätzlich zur Lagerung mit einem Drucklager gegeneinander gestützt werden, denn es treten starke magnetische Zugkräfte auf, ist aber technisch nicht schwierig. Es gibt auch Scheibenläufermotoren, bei denen befindet sich eine Läuferscheibe zwischen zwei Ständerteilen Man benutzt solche Motoren gerne als Fensterheber in Kraftfahrzeugen, sie sind so flach, daß sie bequem in Fahrzeugtüren passen und sie bauen hohe Drehmomente auf.
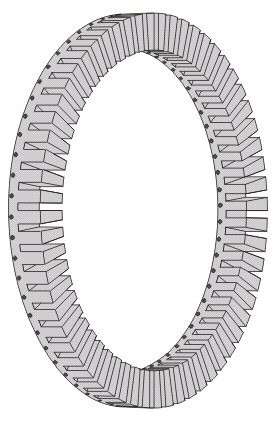
Die großen Drehmomente lassen sich dadurch erklären, weil im Vergleich zur Maschinenmasse die wirksame Polfläche sehr groß ist. Meine Idee war nun die, daß man Elektroblech zu einem Ring aufwickelt
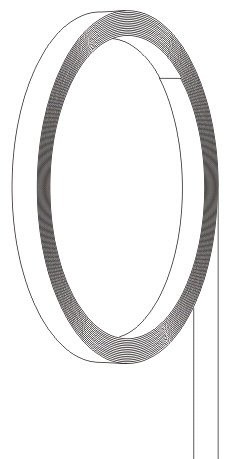
und Nuten entsprechend der Abbildung rechts einfräst. Diese Formgebung hatte ich speziell für eine Anwendung im Bereich Modellbau gebraucht. Der Ständer der Maschine bekommt Wicklungen in jede einzelne Nute. Der Läufer kann je nach Funktionsart Wicklungen bekommen oder ein Kurzschlussläufer einer Induktionsmaschine sein. Deßhalb stellte ich nur einen Ring dar. Es gilt nun das Gleiche wie bei dem Scheibenläufer. Beide Teile wirken mit den Stirnflächen zusammen, müssen gegeneinander gestützt gelagert werden.
Nun überschlug ich, welche Drehmomente ich mit der Anordnung erreichen könnte. Die Ergebnisse, die ich erreichte, waren größer, als die, die man von Scheibenläufern kennt. Also zweifelte ich meine Berechnungsergebnisse an, berechnete das Beispiel mehrmals unter verschiedenen Aspekten, das Ergebnis war immer wieder das Gleiche. Das erreichbare Drehmoment ist bei der Ringform weit höher als bei einer Scheibe mit gleichem Durchmesser!
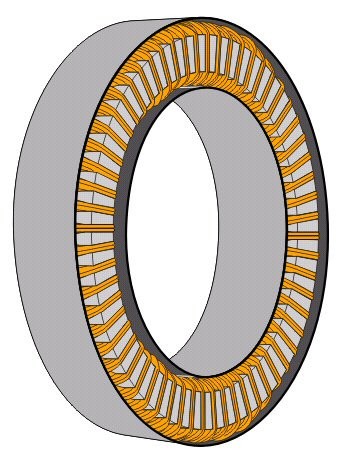
Nachdem ich das erkannte, schob ich die Theorien für Modellbau zunächst beiseite. Die Bilder links zeigen, welche Anwendung ich daraufhin anstrebte. Das mit dem höheren Drehmoment verhält sich übrigens deßhalb so, weil eine Unterteilung in eine weit größere Polzahl möglich ist. Wenn bei einer Scheibe mit gleichem Durchmesser eine zu große Polzahl anstrebt, so würden die erforderlichen Nuten so viel Polfläche wegnehmen, daß diese nach Innen zu schmal würde und irgendwann gar keine Polfläche übrig bliebe. Bereits davor würden die Einzelpole nach Innen hin sehr spitz, und wenn die Nuten im Vergleich dazu zu breit werden, dann ist die Wirkung der Polflächen nicht sehr effizient.
Wir machen nun eine exakte Berechnung:
Der rechts abgebildete Eisenring hat einen Durchmesser von 250 mm. Die Dicke des Ringes beträgt 18,5 mm , rechnete ich aus dem Maßstab der Zeichnung hoch. Ebenfalls durch Abmessen und hochrechnen bestimme ich die Nutenbreite auf 12 mm . Die Stirnfläche des Ringes beträgt :
Kreisfläche Äußerer Durchmesser minus 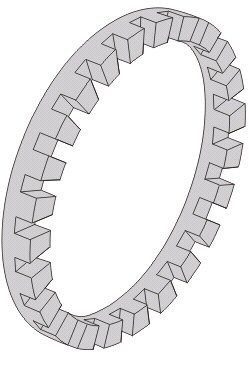
Kreisfläche Innerer Durchmesser
Also 250 x 250 x 3,14 : 4 = 49062
– 213 x 213 x 3,13 : 4 = 35614
bleiben 13448 mm²
Nach Abzug der Nuten
8 x 18,5 mm x 24 Stück = 5328 mm²
Die gesamte Polfläche ist demnach 13448 – 5328 mm² = 8120 mm² Gesamte Polfläche
Ein Einzelpol hat demnach 8120 : 24 = 338,33 mm²
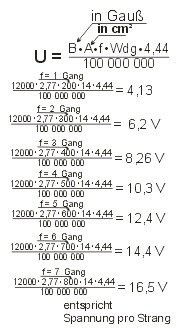
Für die Spannungsberechnung gilt die Transfomatorenhauptgleichung:
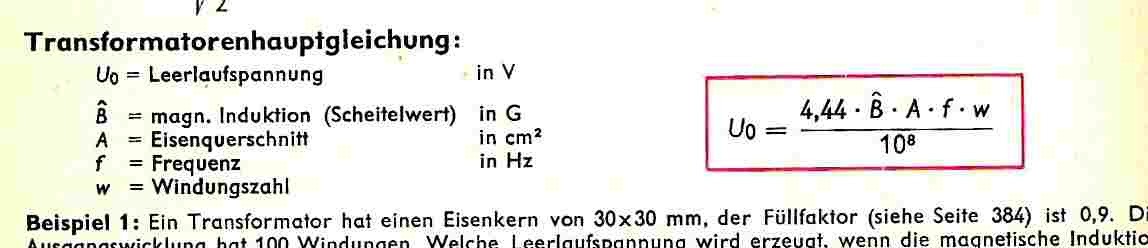
aus ‚Europa Lehrmittel’ ‚Fachkunde Elektrotechnik’, 4. Auflage, 1965 .
Die Zahl 4,44 erklärt sich aus der Kreisfrequenz, Faktor 6,28 und der Quadratwurzel aus 2, Umrechnungsfaktor für Effektivwert. Bei sinusförmigen Vorgängen ist die Größe der jeweiligen Parameter im Bogenmaß ersichtlich und beträgt Umfang/Radius. Dabei ist der Scheitelwert der günstigste Augenblickswert, der Mittelwert ( für die Leistungsberechnung der Quadratische Mittelwert ) beträgt nur den Anteil, wenn man durch Wurzel 2 teilt, das ist der Effektivwert. Die so erhaltene Zahl gilt nur für die sinusförmige Wechselspannung.
Aus der Zeichnung auf der ersten Seite kann man ersehen, daß recht dickes Material ausgewählt wurde. Man kann diese Stränge in Reihe schalten, um auf eine Gesamtspannung ‚normaler Größe zu kommen. Ebenso kann man dünnes Material aufwickeln, eine höhere Windungszahl erhalten und in ‚Parallelschaltung verketten’. Das kommt auf´s Gleiche ´raus. In uns’rem Beispiel sehen wir 3 Windungen nebeneinander, schätzungsweise 4 Lagen, macht 12 Windungen. Ich gehe noch davon aus, daß es sich um Elektro-Traktion im PkW handelt und man hat keine normale Netzspannung, sondern man erhält die Spannung von einem Generator, den man dem Verbrennungsmotor aufgesetzt hat. Ist dieser im ‚ersten Gang’ 2polig, so erhält man bei 6000 U/min 200 Hz .
![]()
![]() = 4,322 V pro Strang (Spule) .
= 4,322 V pro Strang (Spule) .
Wenn wir die Maschine wie eine Drehstrommaschine aufbauen, so sind die 24 Pole in drei Phasen aufzuteilen mit jeweils 8 Strängen (Spulen). Dann hat eine Phase bei 200 Hz 34,5 V .
In technischen Bereichen ist das Maß für die Stärke (Dichte) eines Magnetfeldes das Tesla oder das Gauß. Zwischen beiden Maßeinheiten ist ein Faktor von 10 000 . Ein Tesla = 10 000 Gauß.
Wenn wir ein Magnetfeld mit einer Spule aufbauen wollen, dann hinterlässt eine Spule mit 10 Windungen und 0,1 A die gleiche Wirkung wie eine Spule mit einer Windung und 1 A . In technischen Bereichen kennt man die Einheit AW , Amperewindungen.
Für 1 cm Luftstrecke bekommt man pro AW 1,257 Gauß Induktion, Magnetfeld.
Eisen leitet magnetische Feldlinien weit besser als Luft, mindestens um den Faktor 10 000 . Deßhalb ist es fast unsinnig, in magnetischen Kreisen, wo Luftspalte darinnen enthalten sind, das Eisen mit zu berechnen, die weit überwiegende ‚Felderregung’ benötigt man für den Luftspalt.
In unsrem Beispiel befindet sich bei dem konstruierten Motor in einer definierten Entfernung ein Eisenring als Läufer. Diese Entfernung kann sicherheitshalber 0,5 mm betragen, dichter gehen wir nicht heran, das Rad kann ‚schlagen’.
1,257 Gauß entsprechen 1 AW / cm Luft
25,14 Gauß entsprechen 1 AW / 0,5 mm Luft
12000 Gauß entsprechen 477,3 AW /0,5 mm Luft
477,3 AW : 12 Wdg = 39,777 A – ca 40 Ampere beträgt der Strom für die magnetische Felderregung, der Blindstrom. Bei einem von 0,82 beträgt der Wirkstrom dann 88 Ampere.
Nun ermitteln wir die Kraft, die diese Maschine im Umfang umsetzen können. Der Text unten ist ebenso aus Europa – Lehrmittel, Elektrotechnik.
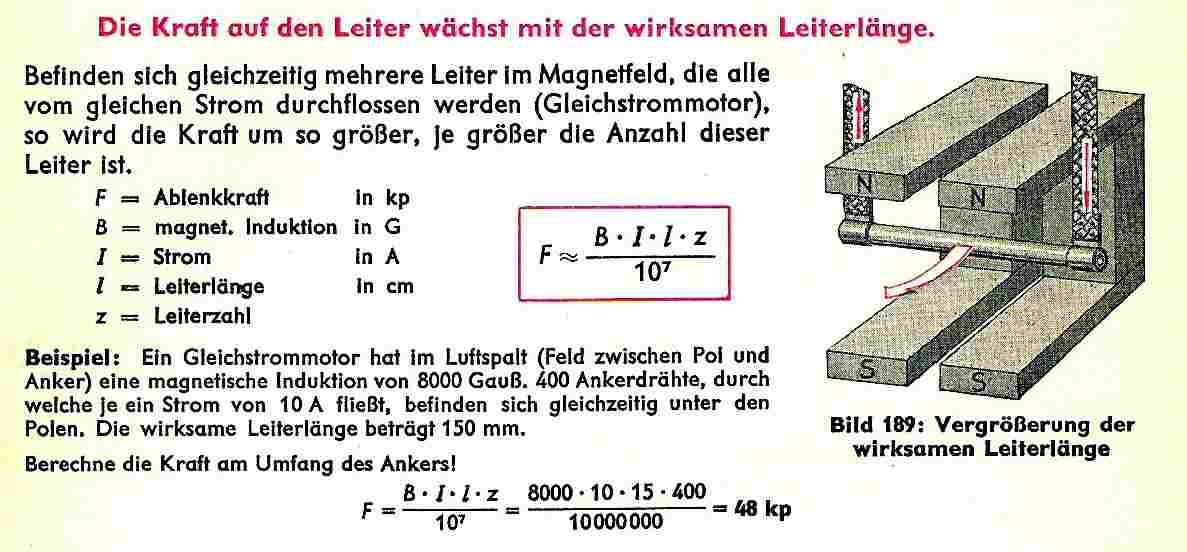
Diese Formel bedarf aber noch drei Korrekturen, speziell für uns´re Anwendung. Die Stirnseite des Ringes hat viele Nuten, so daß die Induktion im Schnitt nicht mehr 12 000 Gauß betragen kann. Das Verhältnis muß mit ![]()
![]()
hineingerechnet werden. Die Induktion, die über einem Pol austritt, ist die Differenz zwischen zwei Phasen. Diese ist so groß wie eine Phase, als wäre die Spule nicht um den Ringkern, sondern um den Pol gewickelt. So groß ist auch die Kraftwirkung
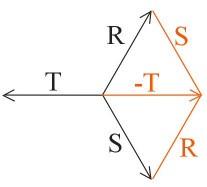 (Zeigerdiagramm links). Demnach muß die Spulenhälfte mitberechnet werden, die hinter der wirksamen Polfläche ist. Dann ist der Wert 12000 Gauß, von dem aus wir rechnen, der Spitzenwert. Der muß durch V2 geteilt werden.
(Zeigerdiagramm links). Demnach muß die Spulenhälfte mitberechnet werden, die hinter der wirksamen Polfläche ist. Dann ist der Wert 12000 Gauß, von dem aus wir rechnen, der Spitzenwert. Der muß durch V2 geteilt werden. ![]()
![]()
= 2 kp über einer Nute, im ganzen Umfang
bei 24 Nuten 48 kp
Wenn der ringförmige Motor im Umfang fast 50 kp hat, dann ist das für momentan technisch vergleichbare Werte etwas knapp. Das Rad hat etwa den doppelten Durchmesser wie der ringförmige Motor. Die Kraft, die also im Radius des Elektromotors 48 kp beträgt, ist im Radumfang infolge der Hebelwirkung etwa halb so groß, etwa 24 kp. Bei 4 Antriebsrädern wären das 96 kp. Für einen leichten Wagen oder ein Elektrofahrzeug wäre das ausreichend, für Pkw´s heutigem Standard nicht, das wäre nicht ‚marktfähig’.
Obwohl es eigentlich ein ordentlicher Unsinn ist, was wir tun. Um ein bis zwei Personen zu fahren setzen wir eine Leistung um, die ausreicht, einen schweren Lkw anzutreiben. Wir haben schon ganze Klimazonen verschoben. Wie soll das weitergehen?
Im Mittelmeerraum gibt es Fahrzeugtypen, die kennt man hier fast gar nicht. Das Fahrzeug ist leicht, der Motor liefert eine Leistung, für unsere Begriffe im ‚untersten Bereich’, dennoch beschleunigen diese Fahrzeuge gut bis sehr gut, weil sie eben leicht sind. Und – der Verbrauch ist derart minimal, daß die Fahrzeugindustrie und die damit verbundene Lobby eine Entwicklung dahin gar nicht will.
Aber zurück zu unsren Berechnungen:
Um einen Pkw zum Laufen zu halten ist das genug oder schon mehr als das. Um anzufahren, beschleunigen, Steigungen zu nehmen ist das zu wenig. Man kann an der elektrischen Maschine einiges ändern. Man kann
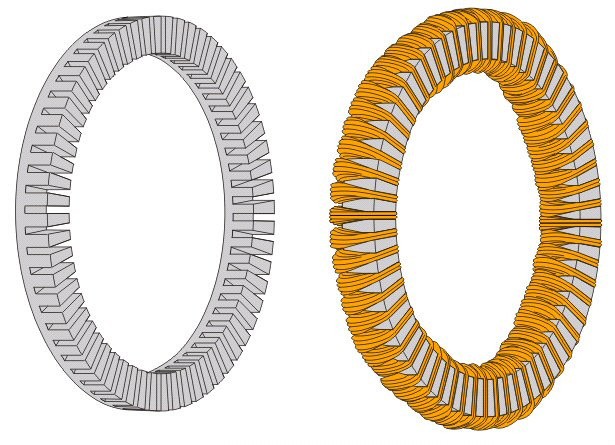
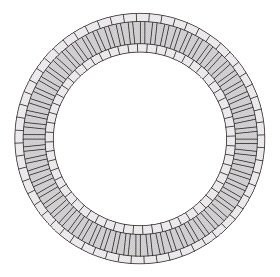
 Man kann das Elektroblech dicker aufwickeln, der Ring bekommt eine andere Stärke, größere Pole. Die Polzahl kann man anders wählen. Deßhalb rechne ich noch ein anders dimensioniertes Beispiel durch. Der rechts abgebildete Ring hat 60 Einzelpole. Im Elektromaschinenbau spricht
Man kann das Elektroblech dicker aufwickeln, der Ring bekommt eine andere Stärke, größere Pole. Die Polzahl kann man anders wählen. Deßhalb rechne ich noch ein anders dimensioniertes Beispiel durch. Der rechts abgebildete Ring hat 60 Einzelpole. Im Elektromaschinenbau spricht
man von 20 Polpaaren, wenn man diese Pole auf drei Phasen aufteilt. Der äußere Durchmesser soll 320 mm betragen, die Ringstärke 30mm. Die eingefrästen
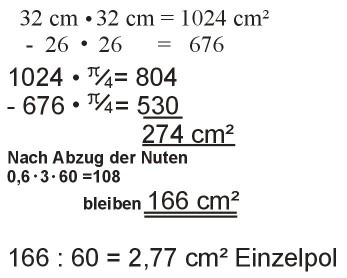 Nuten sind 6mm breit. Bei denen Maßen hat ein Einzelpol nach links aufgeführten Rechnungen eine Polfläche von 2,77cm². Die Wicklung ist für unsere Berechnungen aufgeführt wie im Bild rechts, 14 Wdg. Pro Strang. Auch hier gilt, daß das nicht zwingend ist, man kann auch dünnes Material auswählen, das würde pro Strang größere Windungszahlen ergeben und man verkettet parallel. Aber folgen wir weiter dem vorgeschlagenen Beispiel. Die eingetragenen Frequenzen in den rechts stehenden Rchnungen sind richtig, wenn der Generator
Nuten sind 6mm breit. Bei denen Maßen hat ein Einzelpol nach links aufgeführten Rechnungen eine Polfläche von 2,77cm². Die Wicklung ist für unsere Berechnungen aufgeführt wie im Bild rechts, 14 Wdg. Pro Strang. Auch hier gilt, daß das nicht zwingend ist, man kann auch dünnes Material auswählen, das würde pro Strang größere Windungszahlen ergeben und man verkettet parallel. Aber folgen wir weiter dem vorgeschlagenen Beispiel. Die eingetragenen Frequenzen in den rechts stehenden Rchnungen sind richtig, wenn der Generator
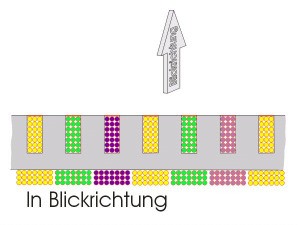
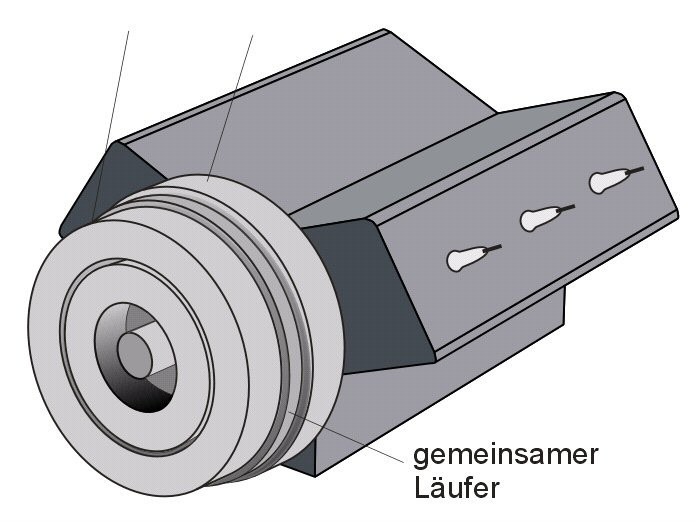
 aus mehreren Sätzen unterschiedlicher Polzahl besteht, Bild links unten. Beide Generatorenteile stehen sich gegenüber und ein gemeinsamer Läufer befindet sich dazwischen. Der so konstruierte Generator ist am Fahrzeugmotor angeflanscht. Die Gänge werden nun elektrisch geschaltet, damit entfallen Getriebe, Kupplung, Differenzial, alle Achsteile, Kardanwelle….. noch mehr? Mit Sicherheit wäre das ein Riesenvorteil
aus mehreren Sätzen unterschiedlicher Polzahl besteht, Bild links unten. Beide Generatorenteile stehen sich gegenüber und ein gemeinsamer Läufer befindet sich dazwischen. Der so konstruierte Generator ist am Fahrzeugmotor angeflanscht. Die Gänge werden nun elektrisch geschaltet, damit entfallen Getriebe, Kupplung, Differenzial, alle Achsteile, Kardanwelle….. noch mehr? Mit Sicherheit wäre das ein Riesenvorteil
gegenüber bisheriger Bauweise. Namhafte Firmen brüsten sich mit dem ‚Hybrid’ – Antrieb, der im Vergleich zu der hier
 dargestellten Technik einem Spielzeug gleicht. Umso erstaunlicher war es, daß diese Vorschläge von führenden Fahrzeugherstellern verworfen wurden. Zu dem Thema später mehr.
dargestellten Technik einem Spielzeug gleicht. Umso erstaunlicher war es, daß diese Vorschläge von führenden Fahrzeugherstellern verworfen wurden. Zu dem Thema später mehr.
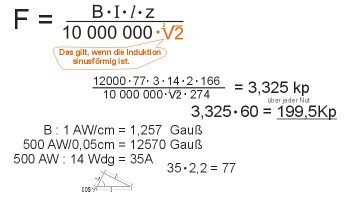
Wir berechnen nun das Drehmoment:
Das unten dargestellte Leistungsdreieck stellt den
COS φ dar.
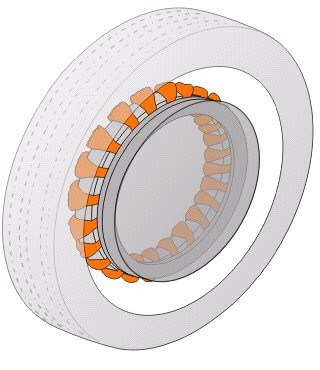
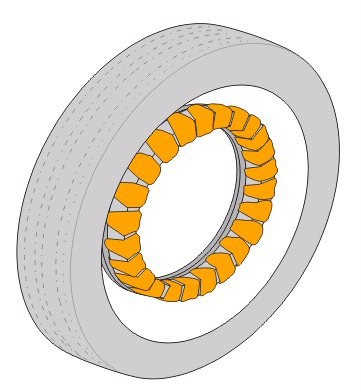
Die oben abgebildete ringförmige Maschine hat den Berechnungen nach eine Kraft im Umfang von ca. 200 kp . Wenn auch hier zu bedenken ist, daß im Radumfang infolge der Hebelwirkung diese Kraft auf die Hälfte zurückgeht, ist das dennoch für einen Pkw voll ausreichend. Wenn man zum Anfahren oder für überdurchschnittliche Steigungen noch mehr Kraft benötigt, ist das in einem ‚Überlastbereich’ möglich, der Wirkungsgrad wird dann schlecht, das ist die einzige Konsequenz. Bei herkömmlicher Technik würde man entsprechend die Kupplung belasten, führt zum gleichen Ergebnis und zu dem Nachteil, daß sich Material im Übermaß verschleißt. Bei dem ringförmigen Elektromotor wird das Material nur heiß, die überschüssige Wärme kann man abführen. Das geschieht, indem sich der ringförmige Elektromotor in einem Gehäuse befindet. Dies ist mit Transformatorenöl gefüllt, es lassen sich Anschlüsse für eine Zirkulation anbringen, wie auch Befestigungsmöglichkeiten. Der Eisenring bekommt
direkt unter den Polen Bohrungen (Bild ganz rechts), durch die sich Speichen durchstecken lassen. Mit diesen Speichen kann man den Motor in ein entsprechendes Gehäuse befestigen. Dieses Gehäuse kann man von der Polseite so verschließen, daß die Pole noch herausschauen (nicht dargestellt).
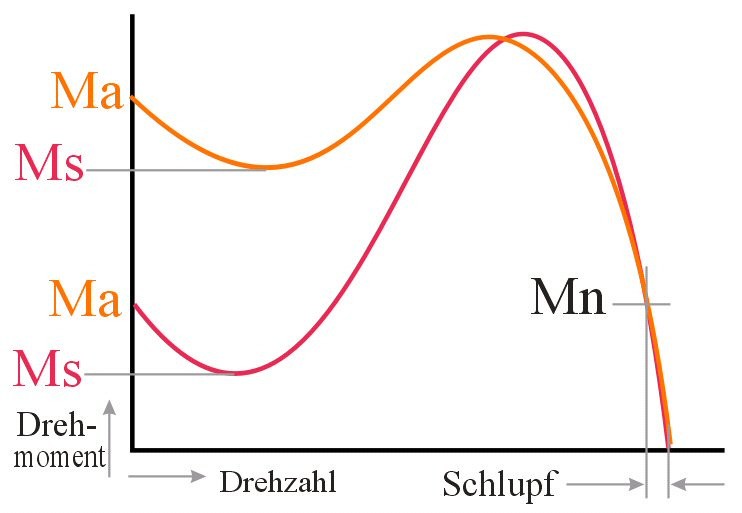
Das Diagramm links erläutert die Charakteristik über das Drehmoment, im Normalbereich und bei Überlast. Bei einem Drehstrommotor legt man eine Spannung an mit einer gegebenen Frequenz. Dementsprechend stellt sich eine Drehzahl ein. Sie liegt knapp unter der ‚synchronen’ Drehzahl. Im Läufer, man nennt ihn in der Elektrotechnik Kurzschlußläufer, befinden sich eingelassene Kupferstäbe, die mit Kupferringen zusammen eine kurzgeschlossene Ausgangswicklung bilden. Das hat zur Folge, daß sich im Läufer starke Sekundärströme und damit Magnetfelder erzeugen, die mit den Magnetfeldern des Ständers das Drehmoment bilden.
Wäre die Drehzahl synchron mit der Frequenz der angelegten Spannung, so könnte in den Läufern nach dem Transformatorenprinzip keine Spannung induziert werden, es würde darin kein Strom fließen. Ein Magnetfeld induziert nur dann in ein anderes Objekt eine Spannung, wenn es sich diesem gegenüber bewegt. Es muß sich demnach je nach Last immer ein bestimmter Schlupf bilden. Der bewirkt eine kleine Drehfrequenz des Magnetfeldes gegenüber des Läufers, Spannung und Strom wird erzeugt und damit auch ein Drehmoment.
Nach dem Einschalten eines Drehstrommotors kennt man verschiedene Drehmomente. Das Anzugsmoment (Ma) liegt ab der Drehzahl null aufwärts an. Dann durchläuft die Charakteristik einen Sattel, dort befindet sich das kleinste Drehmoment, genannt Sattelmoment (Ms). Das ist deßhalb so, weil sich in dem Frequenzbereich der Kurzschlussläufer wie eine Induktivität verhält. Der Sekundärstrom im Läufer liegt phasenverschoben, bildet deßhalb nur halbwegs ein brauchbares Drehmoment.
Es gibt Maßnamen im Elektromaschinenbau, die relativ einfach sind und den Vorgang verbessern (orangefarbene Kennlinie). Besondere Nutenformen im Läufer für die kurzgeschlossene Wicklung bewirken eine Stromverdrängung nach Außen. Läufer derart nennt man ‚Stromverdrängungsläufer’. Die Stromverdrängung hat zur Folge, daß der Widerstand des Kurzschlussläufers bei hohen Schlupffrequenzen zunimmt. Dann liegt der sekundäre Strom im Läufer mehr in Phase, es bildet sich ein höheres Drehmoment. Die Stromverdrängung läßt nach, wenn die Frequenz kleiner wird. Solche konstruktiven Maßnamen sind notwendig, wenn für kurze Betriebsmomente der Überlastbereich durchfahren wird. Allerdings- diese bauliche Maßname, auch wenn sie leicht zu bewerkstelligen und an kleinen Details kaum erkennbar ist, sie bleibt für den Laien schwer verständlich, ist sehr fachbezogen.
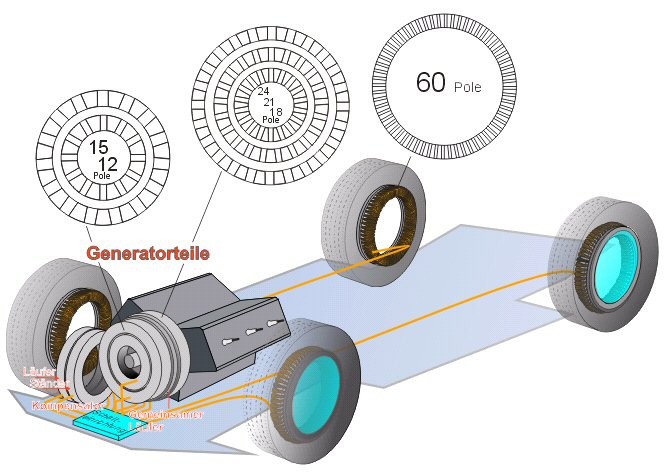
Links ist nun die Abbildung der gesamten antriebsrelevanten Teile. Ein Teil wurde noch nicht angesprochen. Es befindet sich neben dem rechten Vorderrad, kann auch woanders hingesetzt werden. Es ist der Kompensator. In der gesamten Anlage sind nur Maschinen aufgeführt, die Kurzschlussläufer haben. Zur Bildung der Magnetfelder ist ein sogenannter Blindstrom nötig. Es ist ein um 90° versetzter Strom, ist für den Laien nicht auf Anhieb verständlich, muß an der Stelle aber angesprochen werden. Im Normalfall, wenn ein Drehstrommotor am Netz angeschlossen ist, ist das ergiebig genug. In einem geschlossenen System muß dieser Blindstrom erzeugt werden. Dafür der Kompensator. Er hat im Vergleich zu den anderen Maschinen einen Läufer, der ausgeprägte Pole und eine Wicklung hat. Die gesamte Blindleistung wird darin erzeugt. Die Form des Kompensators habe ich genauso gewählt wie die übrigen Maschinen, ringförmig. Es hat den Vorteil, daß auch hier die Baugröße entsprechend klein bleibt.
Auf der Seite 4, untere Hälfte rechts ist noch eine Aufstellung verschiedener Frequenzen für die verschiedenen ‚Gänge’. Es ist erkennbar, daß die Spannung eines Einzelstranges (einzelne Spule, die in jeder Nut um den Ringkern gewickelt ist) mit größerer Frequenz immer größer wird. Man kennt diese Charakteristik auch in Transformatoren, Übertragern. Auch dort nutzt man die Tatsache, daß bei größerer Frequenz die erforderliche Baugröße immer kleiner wird. Bei der ‚ringförmigen Induktionsmaschine’ kommt man bei ganz normalen Drehzahlen in einen Frequenzbereich, der mit Maschinen herkömmlicher Bauweise gar nicht erreichbar ist und damit in Leistungsbereiche, die sind für diese Baugröße mit herkömmlichen Maschinen noch nie erreicht wurden. Es liegt ganz einfach an der Unterteilung in derart kleine Pole im Umfang, wie das bei normalen Maschinen, auch bei Scheibenläufern konstruktiv gar nicht geht. Die Leistung ist auch größer als in einem Scheibenläufer mit gleichem Durchmesser. Als ich das damals erkannte, meldete ich diese Idee patentrechtlich an. Das Patent bekam die Kennziffer H 02 K 1/06 . Die Offenlegungsschrift bekam die Ziffer DE 37 11 711 A 1 . Anmeldung am 4. 7. 87, die Offenlegungsschrift kam am 27. 10. 88 .
Nun rechne ich noch die Leistung aus den gefundenen Werten hoch. Einige Beispiele zur Spannungsbestimmung : (Aufstellung Seite 4)
Bei der ersten Gleichung, wo als Frequenz 200 Hz eingetragen ist, erhalte ich eine Strangspannung von 4,13 V .
Bei der dritten Gleichung Frequenz 400 Hz
Strangspannung 8,26 V .
Bei der letzten Gleichung Frequenz 800 Hz
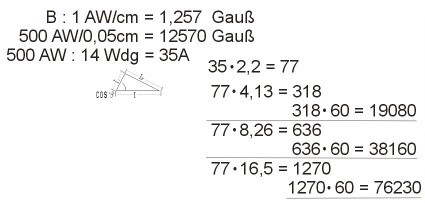
Strangspannung 16,5 V .
Im ersten Beispiel bei 4,13 V erhalte ich bei 77 A (gefunden aus dem Leistungsdreieck, Blindstrom 35 A x 2,2 , kleines Bild nebenstehend) 318 Watt pro Strang, bei 60 Strängen 19 KW
Im zweiten Beispiel bei 8,26 V 38 KW Gesamtleistung
Im letzten Beispiel bei 16,5 V 76 KW Gesamtleistung .
Das ist noch keine zwingende Leistungsgrenze! In den obigen Beispielen gehe ich von einer Drehzahl
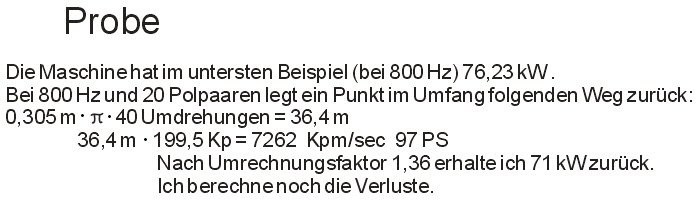
von max. 2400 U/min aus, entspricht der theoretisch maximalen Drehzahl der Hinterachse, wäre für die Endgeschwindigkeit sogar schon etwas zu hoch gegriffen.
Bei anderen technischen Anwendungen kann man die Maschine ohne Probleme mit 6000 U/min betreiben, ist bei einem Durchmesser von 32 cm noch völlig unproblematisch. Ich komme bei gleicher Weise der Berechnung auf 190 KW, bei 2000 Hz .
Eine Maschine mit einer vergleichbaren Leistungsdichte – als Starkstromelektriker komme ich aus dem Fachbereich – kenne ich nicht, gibt es offensichtlich noch nicht.
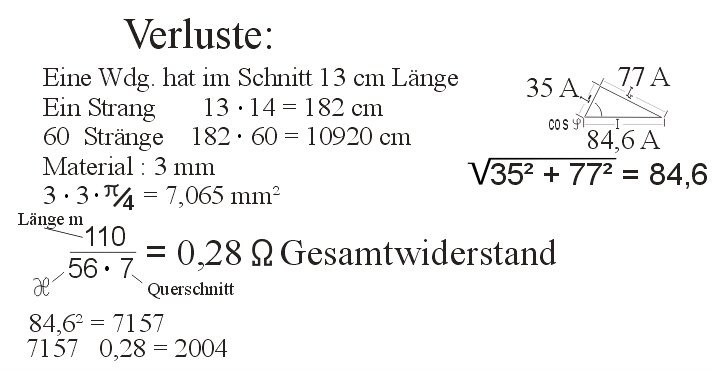
Entsprechend den Nebenrechnungen beträgt der Nennstrom 84,6 A . Bei einem gesamten Innenwiderstand von 0,28 Ohm entsteht eine Verlustleistung von ca.
 2 KW .
2 KW .
Diese Angabe ist relativ. Es kommen noch Ummagnetisierungsverluste hinzu und das ist noch nicht alles. In großen ‚Gängen’ nimmt die Spannung zu und der Strom ab. Der Strom kann dann 40 -50 A betragen. Dann betragen die Kupferverluste 450 – 700 Watt. Ummagnetisierungsverluste sind auch relativ – sie sind frequenzabhängig, abhängig von der Höhe der Induktion und davon, welche Materialien verwendet werden.
Es gibt Hersteller, die Elektrobleche auf 0,1 – 0,2 mm auswalzen. Dann betragen die Verluste (bei normalen Materialien bei 800 Hz und ca. 5 Kg Fe etwa 2 KW) etwa 200 Watt, geht man mit der Induktion herunter, in großen ‚Gängen’, wo das volle Drehmoment nicht gebraucht wird, etwa 60 Watt.
Nun kommen Verluste noch hinzu für Generator und Kompensator.
Betrachte ich aber die elektrische Maschine alleine und vergleiche die Verluste mit der Nennleistung, erhalte ich folgende Wirkungsgrade: bei 19 KW 88,5 %
bei 38 KW 94,2 %
bei 76 KW 97,1%
bei 190KW 98,5% 2000 Hz
Beziehe ich die Tatsache mit ein, daß bei großen Gängen der Strom und die Induktion stark nachlassen bei ca. 20 KW pro Rad 97 % .
Es kommen noch Verluste im Läufer dazu, verhältnismäßig gleich groß wie die Kupferverluste in den Radmotoren. Das ist konstruktionsbedingt.
Stelle ich das mechanischen Beispielen gegenüber, ist die Elektrotraktion effektiver.
Der Freilauf bei so einer Konstruktion ist optimal. Wenn der Radmotor kein Drehmoment überträgt, der Wagen also rollt, dann muß keine Induktion anliegen und das Drucklager zwischen Ständer und Läufer erzeugt keine Reibung. Herkömmliche Systeme in Elektrofahrzeugen haben ein Untersetzungsgetriebe, ‚Vorgelege’ dazwischen, das mit seiner Reibung, Selbsthemmung immer darinnen bleibt. Bei Hybridfahrzeugen ist es möglich, diese Getriebe auszukuppeln, macht aber einen entsprechenden Aufwand notwendig.
Die ungefederte Masse soll so klein wie möglich sein. Deßhalb ist die Masse der elektrischen Maschine zunächst störend. Man kann aber den Läufer mit einem Pendellager gegen den Ständer stützen. Dann wirkt die Masse des größeren Teiles der Maschine nicht mehr direkt als Trägheit ein, kleinere, ‚spitze’ Stöße wirken nur mit der Trägheit des Läufers zusammen. Bei größeren und langsameren Ausschlägen bewegt sich der Ständer des Radmotor´s mit.
Der Industrie machte ich noch viele andere Vorschläge zur Anwendung. Es ist einfach unglaublich, daß auch diese verworfen wurden. Man erlebt es oft, daß Ideen blockiert werden, weil sie zu gut sind. Es würde neue Prioritäten festlegen, was man weitgehend nicht will. Aber da ist noch der Neid, Mißgunst.
Mit meinen Vorschlägen wollte ich nicht nur die Elektrotraktion in Fahrzeugen ermöglichen. Es ging sogar überwiegend darum, die Grundlage für das Elektrofahrzeug zu bilden. Nicht nur! Mit der elektrischen Maschine kann man auch bremsen, kein Materialverschleiß! Die elektrische Maschine hätte ohne exakte Steuerung von Natur aus ein ABS-ähnliches Verhalten, weil in dem Fall die Radmotoren als Generatoren betrieben würden. Einen feststehenden Läufer bei einem Generator, wo Leistung herausfließt, gibt es nicht. Also ein völliges Blockieren der gebremsten Räder wäre von Natur aus gar nicht möglich. Und bei genauerer Steuerung der elektrischen Leistung sind noch genauere Betriebsverhalten möglich als in Systemen, wo Elemente für die mechanische Umsetzung mit ihrer Trägheit noch mit einwirken.
Man riet mir vielfach an, ein positives Gutachten einzuholen. Dem ging ich nach in verschiedenen Instituten. Hier kam der Neid der Akademiker mit hinein – ein kleiner Proletarier entdeckt so etwas –
Man entdeckte da und da Fehler(chen), die von der Begründung her mir und auch Anderen recht zweifelhaft vorkamen. Und – wäre wirklich ein oder einige schwerwiegende Fehler darin enthalten, so müßte jeder, der die Ausarbeitungen überprüfte, auf diese gleichen Fehler gestoßen sein. Statt dessen fand jeder woanders ein ‚ Haar in der Suppe ’ . Es war schon Böswilligkeit!
Charles Darwin spielte in seiner Abstammungslehre darauf an, daß uns´re Art höher entwickelte Affen seien. Es gibt viele Mitmenschen, die sich darüber empören. Mit welchem Recht, wenn Spitzen uns´rer Gesellschaft, hochgestellte Akademiker, Entscheidungsträger sich mit Absicht Fehlurteile leisten, um Entwicklungen, die Sinn machen zu verhindern? Damit fügt man nicht nur dem Erfinder, sondern auch der Gesellschaft, in der wir alle leben, erheblichen Schaden zu.
Gastbeitrag von Erfinder Manfred Binder
Grafiken: Erfinder
Ganzer Text als PDF RingfoermigeInduktionsmasch
Danke fü diesen interessanten Beitrag.
würde den Kontakt benötigen
dafür gibt es ein Kontaktformular
In meinem Blog ‘Manisvisionen´s Blog’ ist dieser Bericht auch, als DOG-Datei. Ab und an schaue ich mal nach Slimlife. So fällt mir Ihr Kommentar auf. Dieser wird von Slimlife nicht automatisch zu mir hingeleitet.
Meine Emailadresse ist bindermanfred@ymail.com
Ein Prototyp wurde nicht gebaut.
Wenn Sie näheres über mich, den damaligen Entwurf wissen möchten, schicken Sie doch gerne eine Nachricht an mich.
Manfred Binder
Hallo Herr Binder,
Ihre Überlegungen zur Drehmomenterhöhung beim Asynchronmotor finde ich interessant.
Da ich gerade dabei bin ihn zu berechnen, benötige ich gemessene Drehmomentkennlinien dazu.
Können Sie mir diese zur Verfügung stellen?
MfG, Ihr Axel Rossmann
Leider werden Kommentare von Slimlife nicht automatisch zu mir weitergeleitet. So sehe ich erst heute Ihren Kommentar, Ihre Frage.
Meine Emailadresse ist bindermanfred@ymail.com
In meinem Blog ‘Manisvisionen´s Blog steht dieser Bericht als DOG-Datei.
Ein Prototyp wurde nicht gebaut. So stehen Drehmomentkennlinien nicht zur Verfügung.
Manfred Binder
Da waren sie wohl schneller als ich mit der Ausarbeitung, auch ich bin gelernter Energieanlagenelektroniker und befasse mich seit der Lehre mit diesem Tema und bin auf ähnliche Ergebnisse gekommen wie Sie. Meine Konstruktion ähnelt ihrer in so fern das ich Methoden gesucht habe ein Fahrzeug umzurüsten und einen Verbrennungsmotor als Reichweiten Erweiterer zu benutzen. Dies hat zur folge das die Achse die Vorhandene Bremsanlage behalten sollte und die felge Größer werden musste um in dem Zwischenraum einen Elektrischen Motor zu Platzieren. Einfach aus dem Grund um diverse Problematiken beim TÜF zu umgehen. Wirbelstrombremsen sind Beispielsweise nicht bei PKW zugelassen etc etc etc. Spulenmaterial Wicklungsart und Aufbau Unterscheiden sich bei meiner Konstruktion allerdings Nennenswert sowie ich auf Frequenzumformer und Akku/Cap Energiepufferung setze womit das Prinzip des Ottomotors auch überholt wirkt und ich mich in Richtung Hybrider Flussmaschinen orientierte die in einem bestimten Drehzalbereich einen höheren Wirkungsgrad bei geringerem Gewicht mitbringen.
Meine Erfahrungen gehen dorthin das die Industrie kein Interesse hat ihre Gewinne zu schmälern indem sie Effizientere Methoden entwickelt. Im gegenteil werden solche Patente Aufgekauft um eine Entwicklung zu Stoppen.
Dagegen kommt man eigentlich nur an indem man das so macht wie die Firma Tessar.
Einfach fix und fertig aus dem nichts auftauchen und sich gegen diverse Verleumdungen durchsetzen. Die Technik verkauft sich wie von allein und beim Heutigen stand der Technik muss es noch nicht mal perfekt sein um merklich besser zu sein als die Konkurrenz.
In diesem sinne: Weiter so!!!
Ich habe ein Wind-und Wasserkraftwerk entwickelt, das, ohne der Natur zu schaden dezentral sehr gut einsetzbar ist. Das was Herr Binder dort entwickelt hat, wäre wohl der ideale Generator dafür.
Ich würde diesbezüglich gerne mit ihme reden.
Bin telefonisch unter 03547…. oder 01729… erreichbar.
Viele Grüße
Olaf Petersen
Falls es eine Kapitalbedarfs Planung gibt, bitte ich Zusendung.
Vielen Dank
G.Hirschmann
Es ist einige Jahrzehnte her, da hatte ich eine elektrische Maschine mit einer ungewöhnlichen Bauform erfunden. Das Ergebnis war eine Bauform ideal für die dargestellte Anwendung und eine Leistungsdichte, die bei herkömmlichen Bauformen nicht erreicht wird.
Das stellte ich in meinen Blog, ‚Manisvisionen´s Blog’.
Herr Rutschmann formatiertew das in HTML und stellte das in seinem Blog, ‚slimlife’. Ich war da auch dafür, hatte nichts dagegen – war in meinem Sinn.
Das hatte aber auch zur Folge, daß ich Ihren Kommentar vom 10. November 2013 mit arger Verspätung mitbekomme, denn
– wenn ich nach Kommentaren sehen will, so sehe ich in meinem Blog ‚Manisvisionen´s Blog’ nach
– zu diesem Zeitpunkt hatte ich heftige Probleme, unter Anderem stellte mir die Targobank eine Finanzfalle. Die sind auch bekannt für so was. So hatte ich mich zwangsläufig etwas ‚zurückgezogen’ gelinde ausgedrückt. Und es hat sich auch noch so einiges geändert.
Wenn Sie damals Interesse an einer möglichen Entwicklung hatten – vielmehr – wenn das Interesse noch bestünde, so könnte man abchecken, ob das immer noch einen Sinn macht. So müßte man klären,
– inwieweit Ihr Interesse dahin besteht (nur finanziell oder auch sachbezogen, ideell)
– ob man Chancen für eine Anwendung, Umsetzung sieht, denn nur dann macht das auch einen Sinn. Ein ewiges Planen und Drumherumreden zermürbt einen.
– Beide Seiten sollen etwas davon haben. Nur dann ist auch jeder zufrieden. Ist das nicht der Fall, so läßt man das.
Gruß
Manfred Binder